|
DemoSat /
FieldSatSoftwareThere are two separate components to the FieldSat software. One is the simple program that runs on the microcontroller during flight. The other is the collection of tools that will analyze the data collected by the satellite. This is mainly being handled by David Fifield. All of the source code is available. On-board programmingThis will be written in C for the ATmega32 microcontroller, using GCC and AVR Libc. I have these development tools installed and have used them to compile the unicycle program in the links below. System requirements for on-board programmingThe way I see it, the on-board software has to do these things:
StatusThe on-board software's primary purpose is complete. It reads signals from the analog-to-digital converters and writes them out to an SD card using a special data format. It can also output to the serial port for a live display. I need to make it write to both SD cards, once we get parts in. Source codeYou can get the source sode with GNU Arch. Just do tla register-archive http://www.bamsoftware.com/archive tla get fieldsat--main Post-flight analysis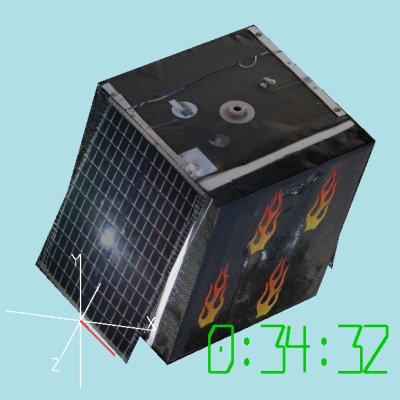 I've written a visualization program that shows the 3D orientation of the payload over time. I would really like to be able to make a graph showing the actual path our satellite took, perhaps overlaid on a map. It will be nice to filter the raw data to reduce the noise and drift. I think the right way to do this is with a Kalman filter. I need to learn more about how these work. Another link is http://www.cs.unc.edu/~welch/kalman/. Links
|